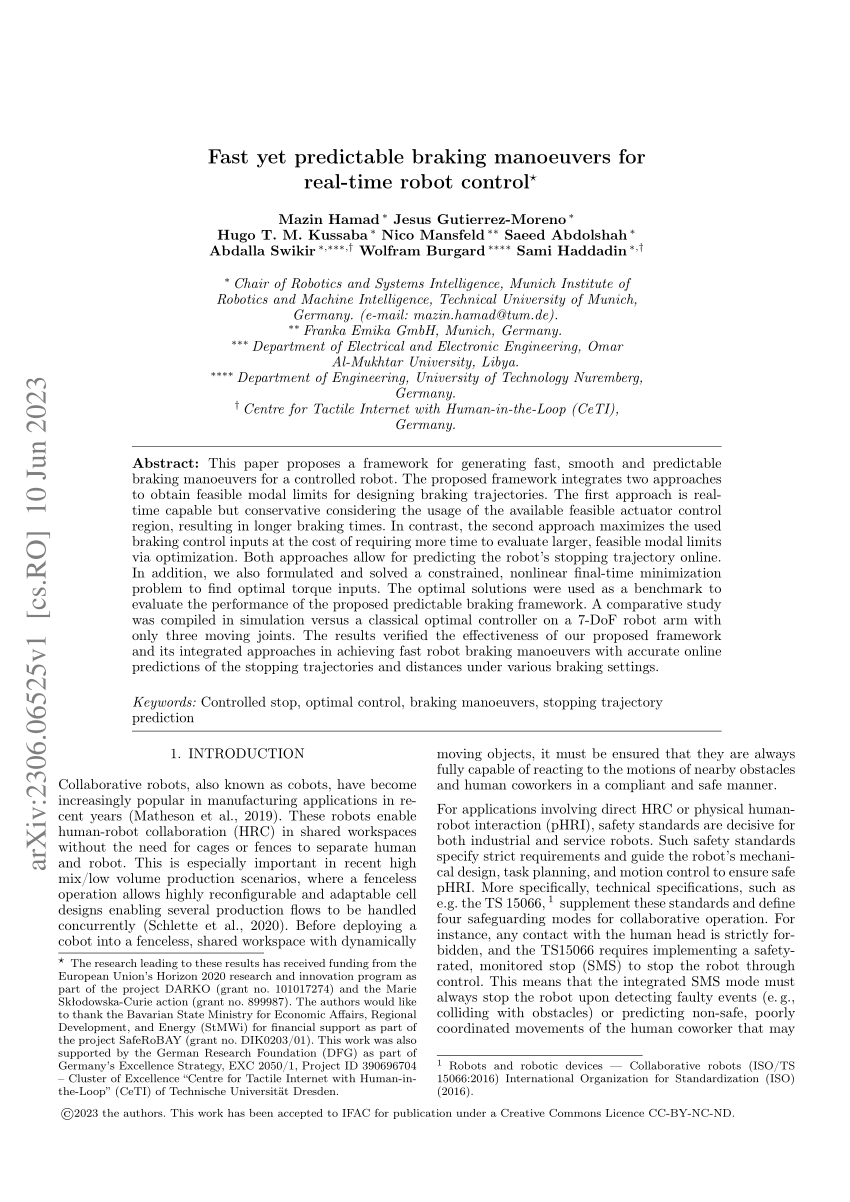
PDF) Fast yet predictable braking manoeuvers for real-time robot control
Por um escritor misterioso
Last updated 26 abril 2025

Real-time motion planning methods for autonomous on-road driving
Applied Sciences, Free Full-Text
Robotics, Free Full-Text

Actual, predicted and command normal contact forces for the sponge

Longitudinal and lateral speed estimates during an emergency
Practical and Experimental Robotics.pdf

A hybrid underwater robot for multidisciplinary investigation of

PDF) Fast yet predictable braking manoeuvers for real-time robot
Robotics
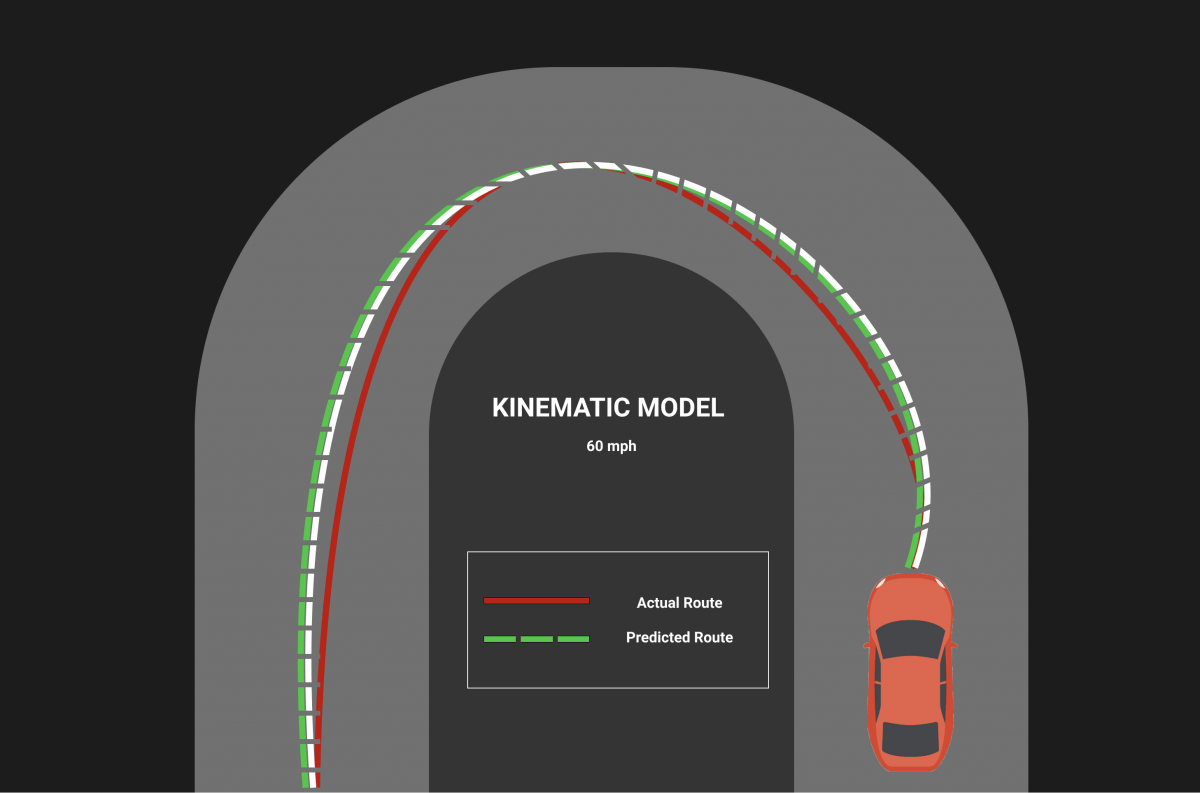
Control Command for Self-Driving Cars
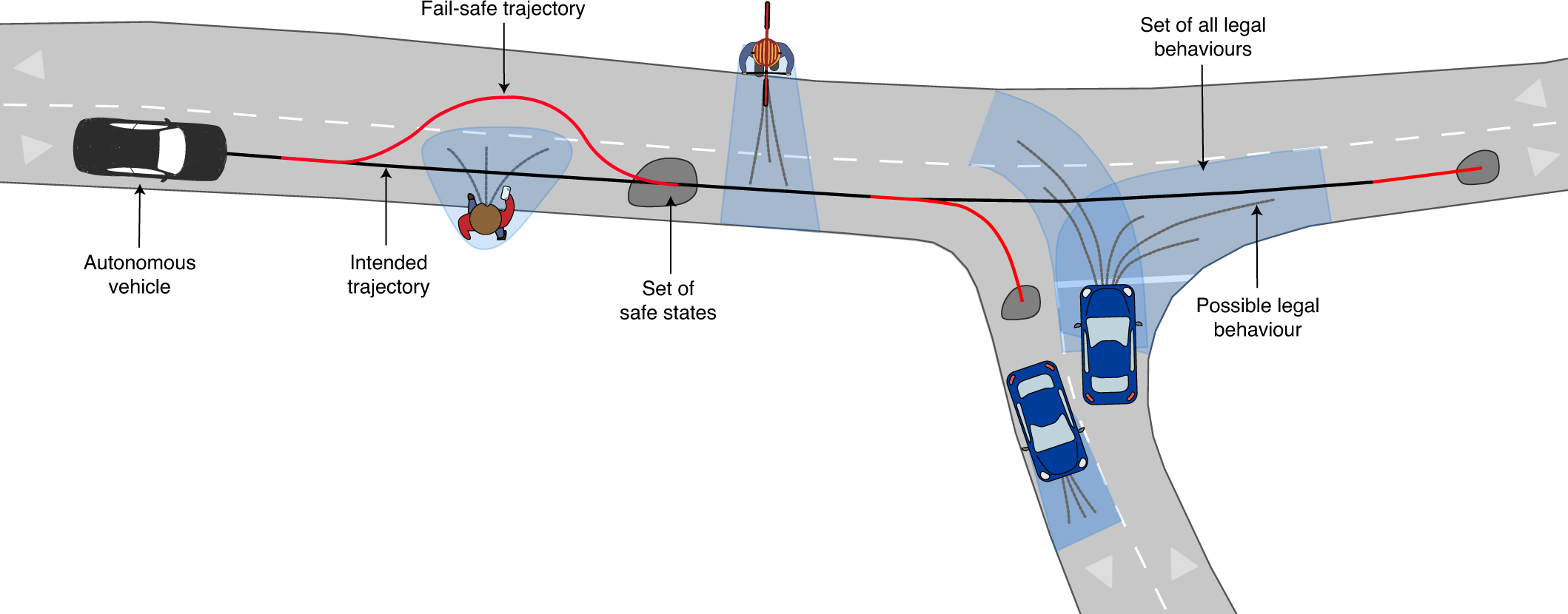
Using online verification to prevent autonomous vehicles from
Recomendado para você
-
 2 Axle Time-Based Brake Controller26 abril 2025
2 Axle Time-Based Brake Controller26 abril 2025 -
 Husky Escort Time-Ramp Trailer Brake Control (31555)26 abril 2025
Husky Escort Time-Ramp Trailer Brake Control (31555)26 abril 2025 -
 How to Use a Trailer Brake Controller - Towing 10126 abril 2025
How to Use a Trailer Brake Controller - Towing 10126 abril 2025 -
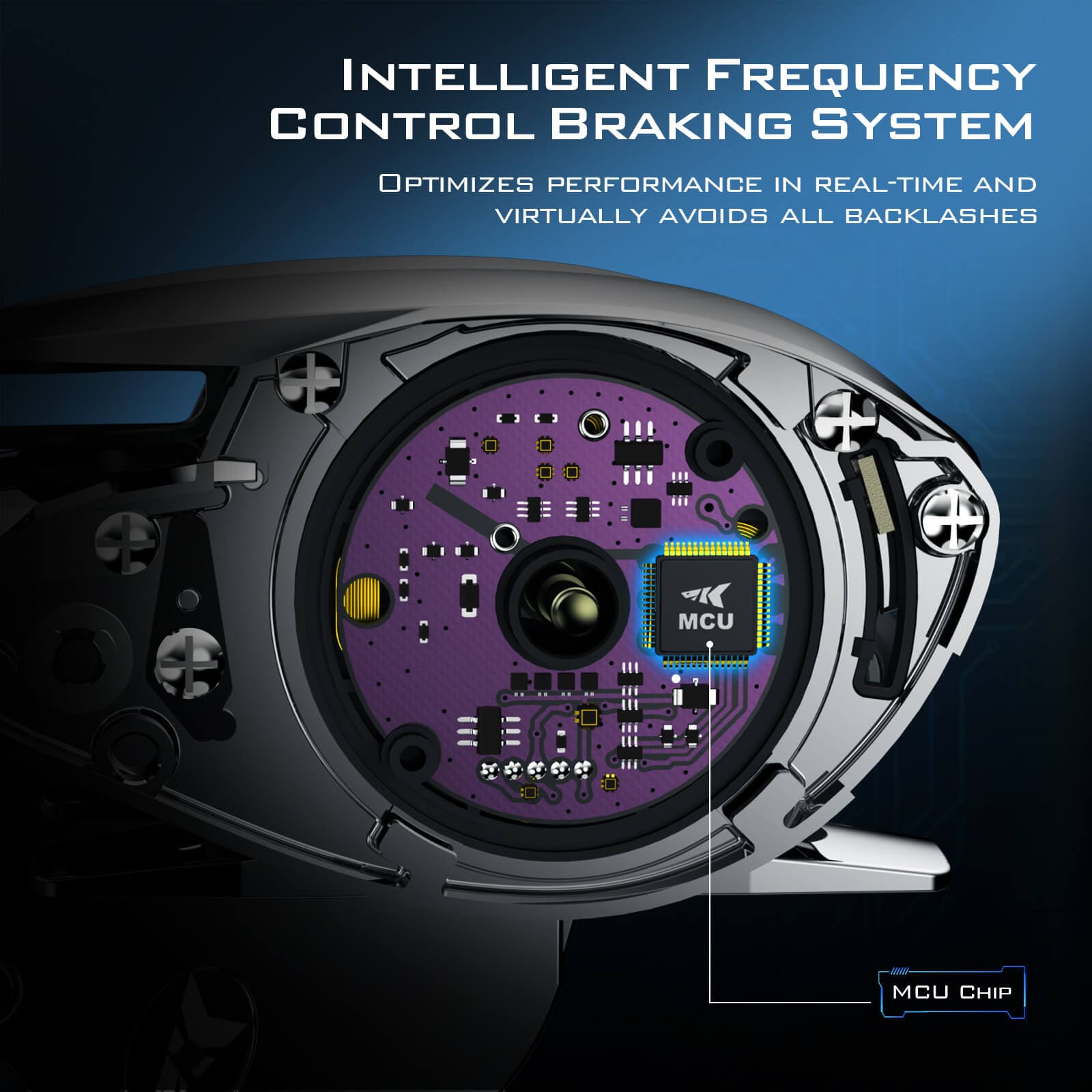 KastKing iReel One IFC Smart Fishing Reel26 abril 2025
KastKing iReel One IFC Smart Fishing Reel26 abril 2025 -
 Automatic Emergency Braking: How It Works - Kelley Blue Book26 abril 2025
Automatic Emergency Braking: How It Works - Kelley Blue Book26 abril 2025 -
 What is a brake controller and how do they work? : Elecbrakes26 abril 2025
What is a brake controller and how do they work? : Elecbrakes26 abril 2025 -
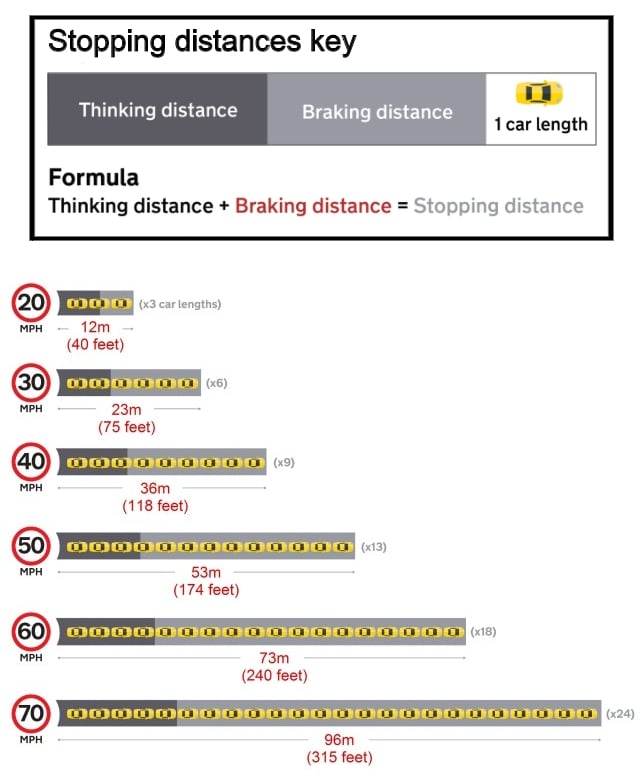 Know your stopping distances26 abril 2025
Know your stopping distances26 abril 2025 -
 Hopkins Towing Solution 47235 Impulse Electronic Brake Control26 abril 2025
Hopkins Towing Solution 47235 Impulse Electronic Brake Control26 abril 2025 -
 ABS/ESC False Activation Diagnostics - Tire Review Magazine26 abril 2025
ABS/ESC False Activation Diagnostics - Tire Review Magazine26 abril 2025 -
 Obtain Wholesale brake padel To Reduce The Braking Time26 abril 2025
Obtain Wholesale brake padel To Reduce The Braking Time26 abril 2025
você pode gostar
-
 Awakened Light Showcase!, Over-Powered Combos!, Blox Fruits, Update 13, Roblox26 abril 2025
Awakened Light Showcase!, Over-Powered Combos!, Blox Fruits, Update 13, Roblox26 abril 2025 -
 Devil Fruit Suke Suke no Mi ( Clear Clear Fruit ) One Piece Minecraft Mod26 abril 2025
Devil Fruit Suke Suke no Mi ( Clear Clear Fruit ) One Piece Minecraft Mod26 abril 2025 -
 FUTEBOL para crianças, Regras básicas26 abril 2025
FUTEBOL para crianças, Regras básicas26 abril 2025 -
 Melon Playground MOD APK 13.4 (Unlocked Everything) Download For Android26 abril 2025
Melon Playground MOD APK 13.4 (Unlocked Everything) Download For Android26 abril 2025 -
![Villains Are Destined to Die] 3rd season ends next week with chapter 124 : r/OtomeIsekai](https://i.redd.it/villains-are-destined-to-die-3rd-season-ends-next-week-with-v0-9qvwgmrkcdwa1.png?width=1080&format=png&auto=webp&s=0ac9d616669be830c48648a520b54bcf8ad15c98) Villains Are Destined to Die] 3rd season ends next week with chapter 124 : r/OtomeIsekai26 abril 2025
Villains Are Destined to Die] 3rd season ends next week with chapter 124 : r/OtomeIsekai26 abril 2025 -
Castle Crashers character DLC now available on PSN26 abril 2025
-
 900+ The Owl House ideas in 202326 abril 2025
900+ The Owl House ideas in 202326 abril 2025 -
 3D file Ben 10 Omniverse - Alien X 3d Printable 👽・Model to download and 3D print・Cults26 abril 2025
3D file Ben 10 Omniverse - Alien X 3d Printable 👽・Model to download and 3D print・Cults26 abril 2025 -
 Speed Drawing-Minato Namikaze (Desenhar Anime)26 abril 2025
Speed Drawing-Minato Namikaze (Desenhar Anime)26 abril 2025 -
 Mundial de Basquetebol - Angola perde na estreia diante de Itália26 abril 2025
Mundial de Basquetebol - Angola perde na estreia diante de Itália26 abril 2025
