Sensors, Free Full-Text
Por um escritor misterioso
Last updated 24 fevereiro 2025
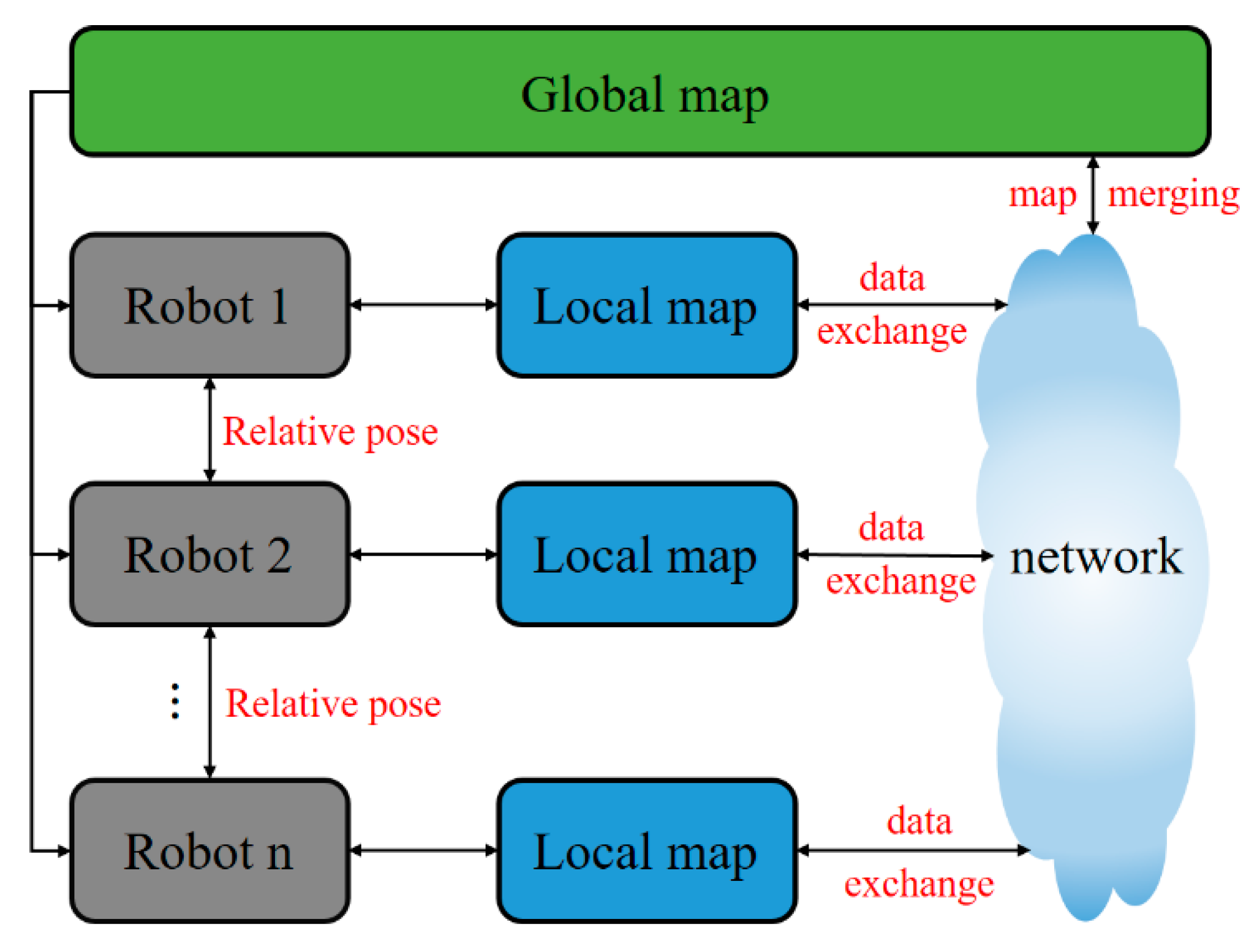
When multiple robots are involved in the process of simultaneous localization and mapping (SLAM), a global map should be constructed by merging the local maps built by individual robots, so as to provide a better representation of the environment. Hence, the map-merging methods play a crucial rule in multi-robot systems and determine the performance of multi-robot SLAM. This paper looks into the key problem of map merging for multiple-ground-robot SLAM and reviews the typical map-merging methods for several important types of maps in SLAM applications: occupancy grid maps, feature-based maps, and topological maps. These map-merging approaches are classified based on their working mechanism or the type of features they deal with. The concepts and characteristics of these map-merging methods are elaborated in this review. The contents summarized in this paper provide insights and guidance for future multiple-ground-robot SLAM solutions.

Cync / C by GE Setting Up Wire-Free Motion Sensors

Bosch 0261230093 Original Equipment Fuel Pressure

Bosch 0261230093 Original Equipment Fuel Pressure

data storage in iot –
TEKSCAN Pressure Mapping / Force Measurement / Tactile Sensor 3000

Advanced Materials: Early View

KEYENCE LRW500 Full-Spectrum Sensor for sale online

Fill-level Sensor with IO-Link FXSL001
Sensors, Free Full-Text

Bambu Lab A1 mini, Desktop 3D Printer
Sensors, Free Full-Text

Applied Research - Wiley Online Library
Sensors, Free Full-Text
Recomendado para você
-
 MINECRAFT#26 - NOVAS CONSTRUÇÕES DA NOSSA CIDADE MODERNA (LIVRARIA24 fevereiro 2025
MINECRAFT#26 - NOVAS CONSTRUÇÕES DA NOSSA CIDADE MODERNA (LIVRARIA24 fevereiro 2025 -
 Duda Ferrão Games24 fevereiro 2025
Duda Ferrão Games24 fevereiro 2025 -
 Duda Ferrão Games24 fevereiro 2025
Duda Ferrão Games24 fevereiro 2025 -
Eduarda Ferrão - Latest version for Android - Download APK24 fevereiro 2025
-
 Novo guia londres 2012 small 3 by Luis Ventura - Issuu24 fevereiro 2025
Novo guia londres 2012 small 3 by Luis Ventura - Issuu24 fevereiro 2025 -
china nao queria fuga #fivemrp #grotarp #luanz7 #complexorp24 fevereiro 2025
-
Colégio Toth Ribeirão Pires SP24 fevereiro 2025
-
 Resumo do dia 4 dos JOGOS PAN-AMERICANOS 2023 - Surto Olímpico24 fevereiro 2025
Resumo do dia 4 dos JOGOS PAN-AMERICANOS 2023 - Surto Olímpico24 fevereiro 2025 -
 Salvador, Bahia - Wikipedia24 fevereiro 2025
Salvador, Bahia - Wikipedia24 fevereiro 2025 -
 Petición · Bring THE LAST OF US to life at Universal Orlando's24 fevereiro 2025
Petición · Bring THE LAST OF US to life at Universal Orlando's24 fevereiro 2025



você pode gostar
-
 Women's Chess Coverage on X: More rating news: Vaishali regains the No. 3 spot for #womeninchess in India with her best month so far this year! 🇮🇳👏👏👏 #chess #womeninchess /24 fevereiro 2025
Women's Chess Coverage on X: More rating news: Vaishali regains the No. 3 spot for #womeninchess in India with her best month so far this year! 🇮🇳👏👏👏 #chess #womeninchess /24 fevereiro 2025 -
 Aprenda a fazer times de futebol de botão com tampinhas, fichas e botões de roupa24 fevereiro 2025
Aprenda a fazer times de futebol de botão com tampinhas, fichas e botões de roupa24 fevereiro 2025 -
 Guilty Gear Strive Bridget Basketball mod 4K24 fevereiro 2025
Guilty Gear Strive Bridget Basketball mod 4K24 fevereiro 2025 -
Lili & Tuti Festas e Cia - Roblox Menina #roblox #robloxparty24 fevereiro 2025
-
 Red Pokemon Trainer by DanielAnything on DeviantArt24 fevereiro 2025
Red Pokemon Trainer by DanielAnything on DeviantArt24 fevereiro 2025 -
 Metacritic: The 20 best video games of 2019 so far (July 2019) - My24 fevereiro 2025
Metacritic: The 20 best video games of 2019 so far (July 2019) - My24 fevereiro 2025 -
 The Sims Mobile - Learn and grow with Family Events in The Sims Mobile24 fevereiro 2025
The Sims Mobile - Learn and grow with Family Events in The Sims Mobile24 fevereiro 2025 -
 Geloucos (30), diveros modelos, bom estado.24 fevereiro 2025
Geloucos (30), diveros modelos, bom estado.24 fevereiro 2025 -
 Nova temporada de Fire Force ganha data de estreia - Vigília Nerd24 fevereiro 2025
Nova temporada de Fire Force ganha data de estreia - Vigília Nerd24 fevereiro 2025 -
 Chapéu de Bruxa ou Bruxo Importado Preto24 fevereiro 2025
Chapéu de Bruxa ou Bruxo Importado Preto24 fevereiro 2025
